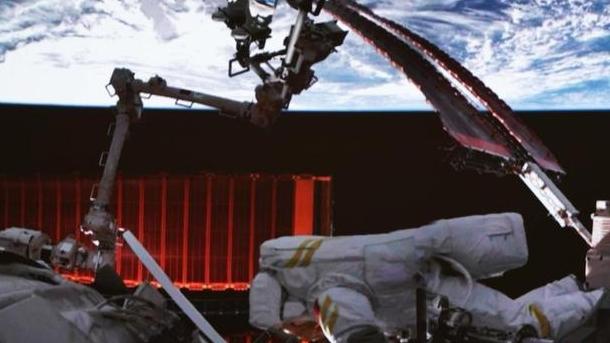
3人は連携しながら宇宙ステーションのロボットアームの支援を受けつつ、コアモジュールのパノラマカメラBの軌道上スタンドの取り付けと調整、実験モジュール「夢天」のパノラマカメラAとBのロック解除および調整などの作業を完了し、午後9時40分に順調に実験モジュール「問天」に戻りました。